





Dúvidas sobre algum produto?


Um Rover inteligente com a Raspberry Pi
MATERIAL NECESSÁRIO PARA ESSE PROJETO
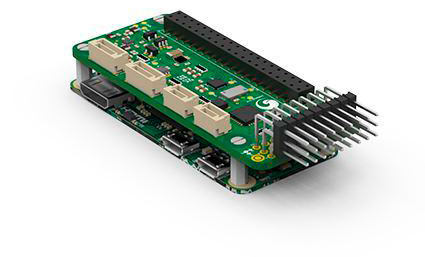
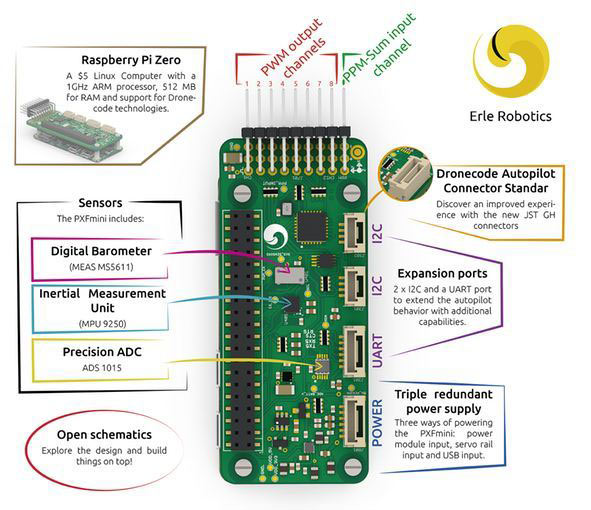
1. Erle Robotics PXFmini
2. Raspberry Pi Zero
3. Raspberry Pi 2 Model B
4. Raspberry Pi 3 Model B
APLICATIVOS E SERVIÇOS ONLINE
1. APM flight stack
2. Debian-based Linux file system for drones
DESCRIÇÃO
Este tutorial demonstra como construir um drone Linux com o Raspberry Pi Zero. O Drone usa um kernel em tempo real Linux, um sistema de arquivos baseado no Debian e Dronecode’s APM flight stack compilado para a placa de piloto automático PXFmini.
Todos esses componentes foram colocados juntos por Erle Robotics em sua imagem do sistema operacional para o PXFmini.
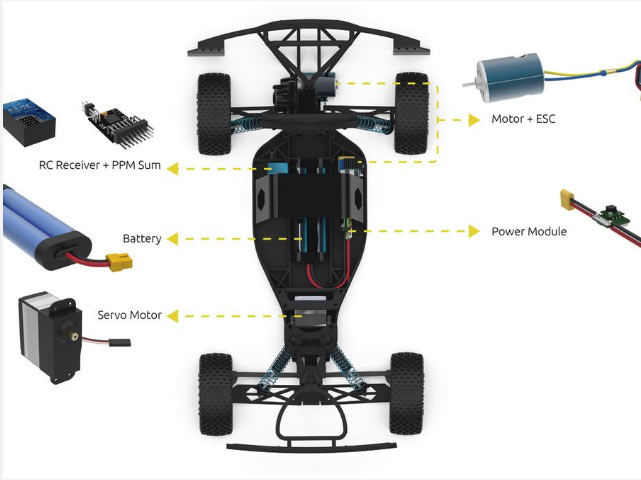
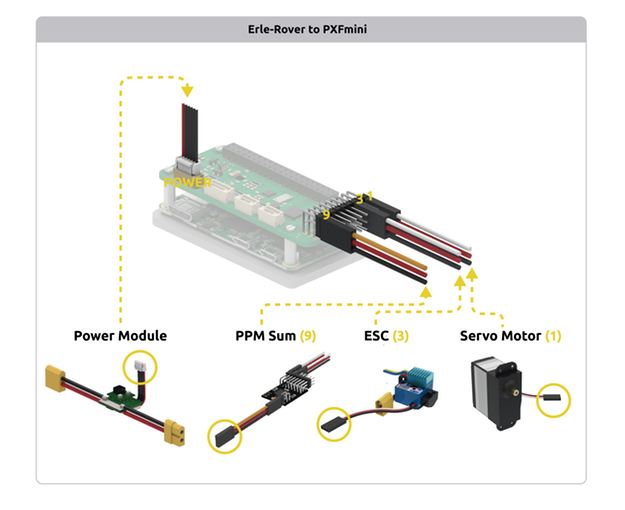
Erle-Rover construído com os elementos descritos abaixo. Você vai ter que ligar estes componentes para pilotos automáticos compatíveis para colocar em operação:
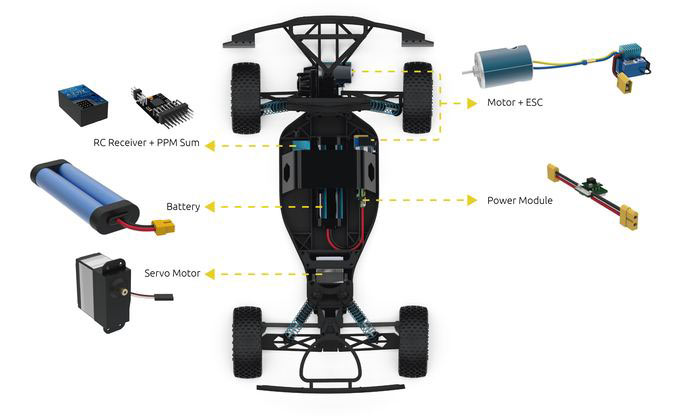
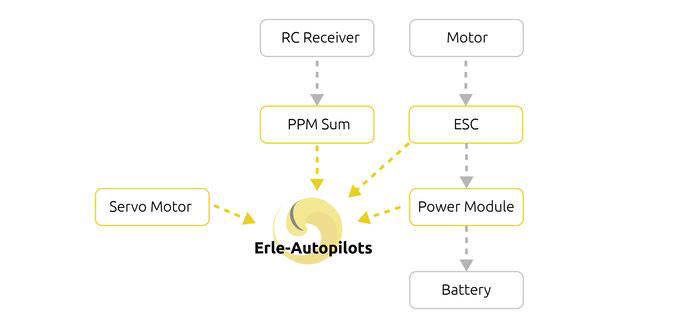
Conexões dos componentes Erle-Rover:
Passo 1: Prepare-se o piloto automático
Conecte o PXFmini shield no topo da Raspberry Pi Zero como descrito abaixo:
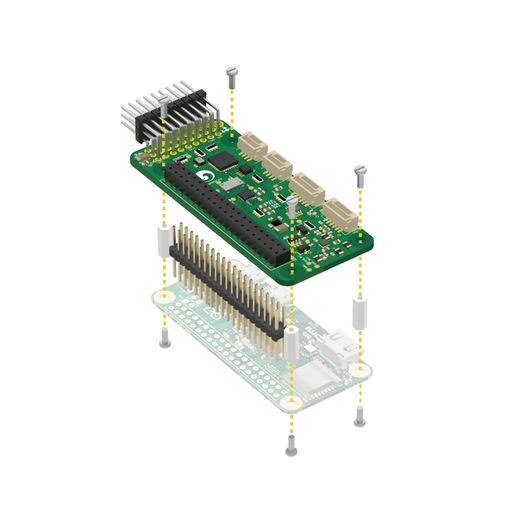
Quase pronto, mas você ainda precisa obter o software certo no set Raspberry Pi Zero + PXFmini. Isto deve incluir um flight stack, um kernel apropriado, e permitir daemons para auto-lançamento no boot, e goodies adicionais.
Felizmente, se você comprou o PXFmini da Erle Robotics você terá acesso às suas imagens Debian que incluem tudo isso para apenas obter uma imagem Debian compatível PXFmini e flash em um cartão microSD.
Passo 2: Montar o Piloto Automático
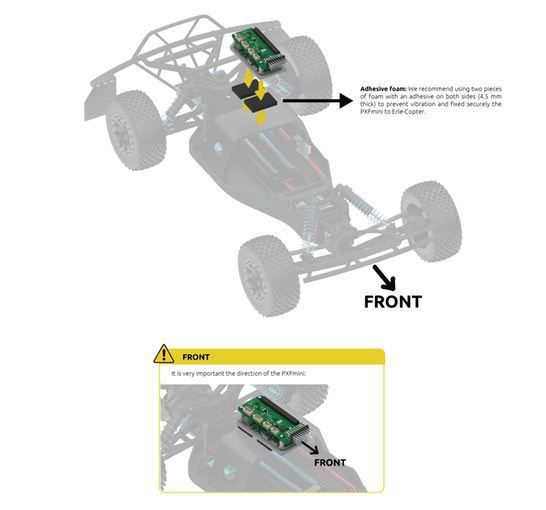
Montagem do piloto automático (Raspberry Pi Zero + PXFmini)no Drone pode ser feito usando vários métodos. Escolha o seu e conecte o cabo JST GH a partir do módulo de alimentação ao PXFmini. Isso dará energia ao piloto automático quando a bateria estiver ligada.
Em seguida é a montagem dos canais PWM no piloto automático. Obter seus cabos ESC e conectar o servomotor 1 (correspondente com a direção) para o canal PWM 1, ESC 2 a PWM 2 correspondente com o acelerador.
Finalmente, você precisa encontrar uma maneira de controlar o seu Drone. Proponho dois métodos:
WiFi + gamepad: Faça o piloto automático criar a sua própria rede Wi-Fi com um dongle USB (imagens de Erle Robótica suportar isso por padrão) e use um gamepath comum para controlar o Drone através de uma estação de controle de solo.
WiFi + ROS: Por acaso você sabe sobre o sistema operacional do robô (ROS)? Você pode usar um nó ROS para visualizar o modo de voo e controlar o Drone.
RC Tradicional: Alternativamente, você pode comprar um controlador de RC com receptor PPMSUM-habilitado e anexá-lo ao piloto automático (para o canal de entrada PPM-SUM).
Para baixar a versão em PDF, clique no link abaixo:
https://www.lojamundi.com.br/download/um-rover-inteligente-com-a-raspberry-pi/um-rover-inteligente-com-a-raspberry-pi.pdf
Fonte: https://www.hackster.io/erle-robotics/pi0rover-a-smart-rover-with-the-pi-zero-885a07?ref=part&ref_id=19713&offset=3





ENTRE EM CONTATO COM A LOJAMUNDI.
